トップ > ラジコン技術記事 > 1段減速ベルトユニット
1段減速 ベルトユニット 開発物語 その6〜7
その6
実際の試作ユニットの設定試算
解説の前に、50プロの開発メンパーは、良く言えば“新しもの好きのチャレンジャー”ですが、悪く言えば敢えて人がやりたがらないことを可能にしたがる人達のようです。
特に「肉体労働」の担当者が言うことにゃあ、「普通に飛んでもしょうがない、6セル1本で何キロの機体がホバって、それでもってアクロもできるか計算して」って…。そりゃあ「頭脳労働」担当者は面喰いますよ(もう、一人で飛んでもヘンタイ飛行なんだから!)。
で、計算した手順と結果は以下のとおりです(毎度の思考手順です)。
6セル5,000mAhで、安全見て20Cなら100A…まあ95Aとして、
6セル×3.5V×95A = 1,995W ≒ 2,000W。
入力2,000Wで効率85%とすれば出力は2,000×0.85=1,700W。
入力2,000W可能なモーター重量は2,000÷400〜450=500〜445g 程度。
出力1,700W回せるペラと回転数を試算すると、19×12を6,200回転で、静止推力は約7kgとなりました。
これなら全備重量5kg程度の機体でなんとかアクロができそうです。
モーターは6,200回転÷6セル×1/2=Kv517程度ということで、ハッカーA50−12L-ET(工レクトリックタービン)Kv=540、重量465gを選びました。
基本構想さえ決まれば、技能労働者(50プロの社長)がCADをひねくりまわして、モーター込みのユニット重量700g強で試作品が完成しました(画像-6)。
|
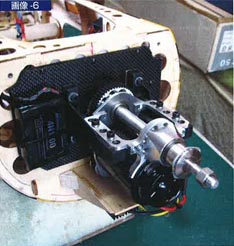 画像-6 画像-6
ちょっとミーハーに防火壁をカーボンで補強してありますが、振動がないので普通のべニヤ板で充分です。
その防火壁に、ARFのキットに入っているような「普通の工ンジンマウント」を使って、ユニットをポンと載せてみました。
|
その7
機体製作と飛行フィーリングについて
試作ユニットが完成し、テストベンチでの結果も概ね良好でしたので、いよいよ実際に機体に搭載してのテストです。
こればかりは、飛ばしてみなけりゃ本当の姿はわかりません。 ここからは「肉体労働者」の独壇場なので、コメントをもらいました。
機体はスパン1,800mmのアクロ機(YAK55M)が手元にあったので、これに決定!
本来はガソリン30cc用なので頑丈な構造ですが、やや重いのが気がかりです。
ARF機ですから、特に製作に関して難しいところはありません。 メカは扱い易く高性能なXG11を使うことに決め、RXやサーボを準備しました。
特にサーボは巷で噂のワイドボルテージサーボを使ってみたく、奮発してしまいました。
お財布が!…です(涙涙の画像-7)。
モーターの取り付けは特別なパーツを必要とせず、あえて一般的な樹脂製の工ンジン機用ラジアルマウントを使用し、ポン載せの至って簡単な方式です。
カウルの中は空き週ぎていますので、風通しの良さそうな場所にアンプを固定したらOKです(画像-8)
|
 画像-7 画像-7
メカは信頼の「JR-XG11」と、最新型の「ワイドボルテージ」で武装?しているのでパッチリです。
|
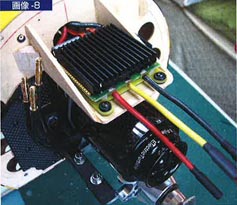 画像-8 画像-8
コントローラーは、冷却を考えてこの場所にセットしています。
ハッカーのエレクトリック・タービンの冷却性能は抜群で、真夏でも安心して使えました。 |
その8へつづく
その5へ戻る |